
6.3 Micro:bit kontroler za Maqueen
Što je senzor za praćenje linije
Zamisli da pomakneš ruku prema naprijed, a vaš mali robot odmah počne voziti! U ovoj vježbi učimo kako iskoristiti senzore u micro:bitu da stvorimo bežični kontroler za robota Maqueen.
- Upravljanje dronovima – nagib ruke može upravljati brzinom i smjerom leta.
- Pametna kolica ili invalidska kolica – senzori mogu otkriti pokret tijela i pretvoriti ga u smjer vožnje.
- Automobili bez vozača – sustavi senzora i komunikacije pomažu u razumijevanju smjera i brzine.
- Igre i simulacije – kontroleri pokreta (kao u Nintendo Wii ili VR kacigama) koriste sličan princip detekcije nagiba.
- Roboti pomoćnici – mogu reagirati na pokrete ruke i pratiti osobe po prostoru.
Vježba
Za ovu vježbu koristimo ugrađeni brzinomjer (akcelerometar) u micro:bitu. On mjeri kako je pločica nagnuta u prostoru i iz toga dobivamo vrijednosti nagiba oko tri osi: naprijed–nazad, lijevo–desno i gore–dolje. U MakeCodeu te vrijednosti čitamo kroz pojmove pitch i roll te ih pretvaramo u smjer i brzinu kretanja Maqueena.
Spoji micro:bit na bateriju, kako bi se mogao nesmetano kretati po prostoriji.
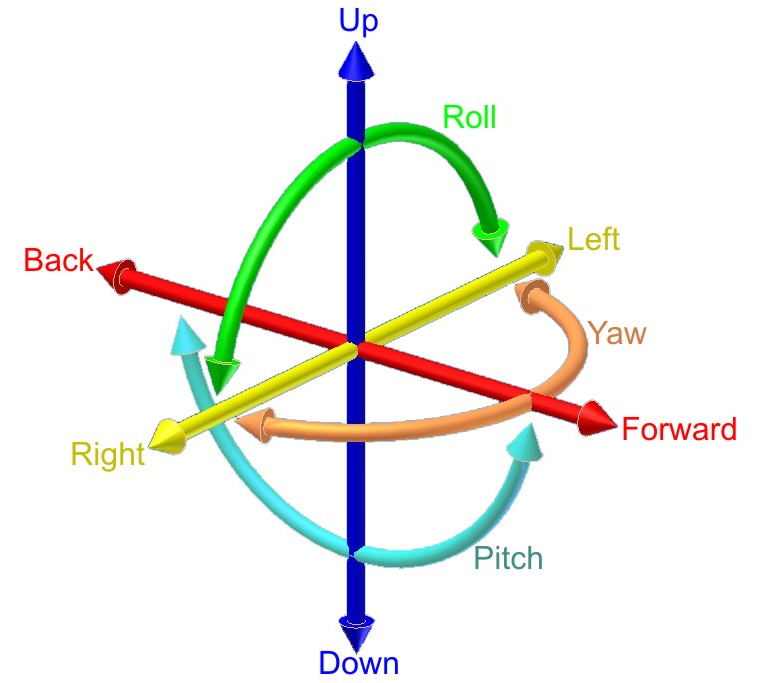
Što je pitch?
Pitch opisuje nagib micro:bita naprijed–nazad.
Kada prednji dio micro:bita naginjemo prema dolje (ka nama ili od nas, ovisno kako ga držimo), mijenja se vrijednost pitch.
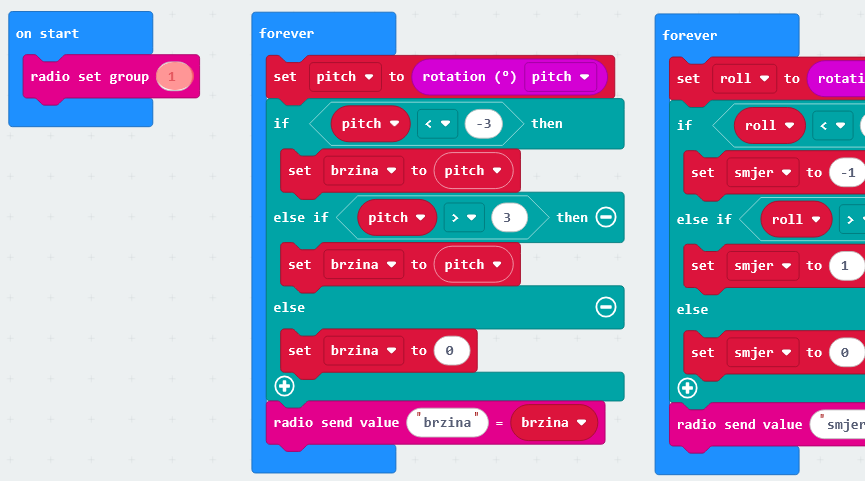
Negativne vrijednosti (npr. manje od −3 stupnja) možemo dogovoriti kao sporije, a veće pozitivne (više od 3 stupnja) kao brže kretanje robota.
Pitch ćemo koristiti za kontrolu brzine Maqueena: što više nagneš ruku, to će robot brže ići naprijed (ili sporije, ako tako isprogramiramo).
Što je roll?
Roll opisuje nagib micro:bita lijevo–desno.
Kad zakrećeš ruku tako da se lijeva strana micro:bita spušta prema dolje, roll će biti negativan (dogovorimo to kao vozi lijevo).
Kad spuštaš desnu stranu prema dolje, roll ide u pozitivne vrijednosti (dogovorimo kao vozi desno).
U vježbi roll zaokružujemo na tri vrijednosti:
- −1 za lijevo,
- 0 za ravno i
- 1 za desno,
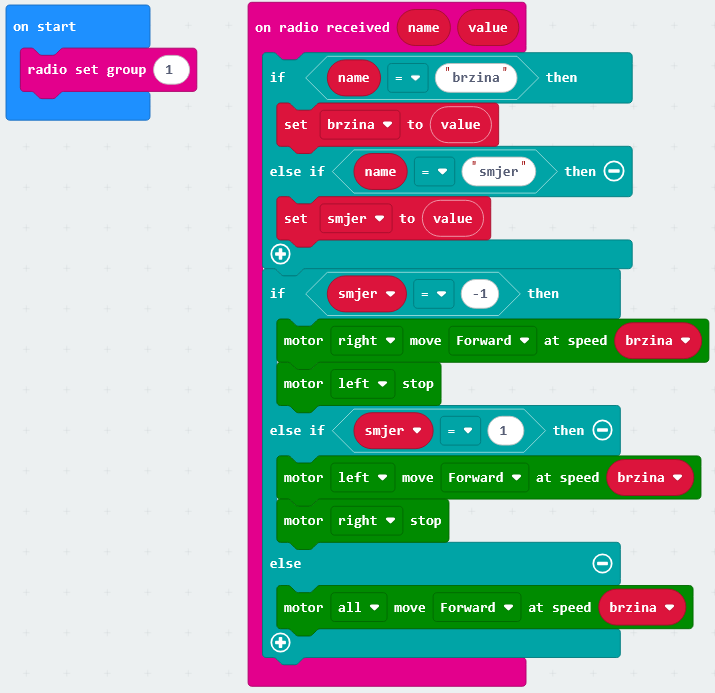
što radio vezom šaljemo drugom micro:bitu na Maqueenu.
Prvi micro:bit nalazi se u vašoj ruci i mjeri nagib (roll i pitch), a zatim te podatke šalje radio vezom drugom micro:bitu na Maqueenu. Na temelju toga robot zna treba li ići lijevo, desno, naprijed ili usporiti.
Zadatak:
- Pogledaj priloženi program i promijeni vrijednost bloka radio set group na broj koji piše na micro:bitu. Ovaj program ćeš programirati na micro:bit kontroler.
- Prouči oba priložena koda i objasni koje će se vrijednosti slati na drugi micro:bit i kako će se on ponašati.
Kontroler
Ne zaboravi promijeniti vrijednost bloka radio set grup!
Vozilo
Dodatna pitanja i zadaci:
- Izmijeni program na kontroleru tako da ispisuje strelice u smjeru u kojem treba Maqueen skrenuti.
 Što smo naučili?
Što smo naučili?
- Kako micro:bit mjeri nagib pomoću senzora (roll i pitch).
- Kako se koriste radio signali za bežično slanje podataka.
- Kako robot može slušati i reagirati na pokret kontrolera.
- Da se uz malo programiranja i mašte micro:bit može pretvoriti u pravi kontroler za robota!
 Razgovaraj na Discord-u.
(pridruži se)
Razgovaraj na Discord-u.
(pridruži se)